L’efficacia della protezione dipende fortemente dal corretto posizionamento della barriera rispetto al pericolo.
La barriera deve essere posizionata ad una distanza maggiore o uguale alla minima distanza di sicurezza S, in modo che il raggiungimento del punto pericoloso sia possibile solo dopo l’arresto dell’azione pericolosa della macchina.
Il posizionamento deve essere tale da:
Il posizionamento deve essere tale da:
Impedire il raggiungimento del punto pericoloso senza attraversare la zona controllata dalla barriera
Non consentire la presenza di una persona nella zona pericolosa senza che essa sia rilevata. Per questo caso potrebbe essere necessario ricorrere a dispositivi di sicurezza aggiuntivi (es.: barriere fotoelettriche orizzontali)
La Norma ISO 13855 fornisce gli elementi per il calcolo della distanza di sicurezza.
Se la macchina considerata è soggetta ad una norma specifica di tipo C è necessario fare riferimento a tale norma.
Se la distanza S calcolata risulta eccessiva è necessario:
ridurre il tempo totale di arresto della macchina
migliorare la risoluzione della barriera
Formula generale per il calcolo della distanza di sicurezza
S = K x T + C
S
distanza minima di sicurezza tra la protezione ed il punto pericoloso, espressa in mm
K
velocità di avvicinamento del corpo o delle parti del corpo, espressa in mm al secondo. I valori di K possono essere:
K = 2000 mm al secondo per distanze di sicurezza fino a 500 mm
K = 1600 mm al secondo per distanze di sicurezza superiori a 500 mm
T
tempo totale di arresto macchina formato da:
t1 tempo di risposta del dispositivo di protezione in secondi
t2 tempo di reazione della macchina per l’arresto dell’azione pericolosa, in secondi
C
distanza aggiuntiva espressa in mm
Direzione di avvicinamento perpendicolare al piano protetto α=90° (± 5°)
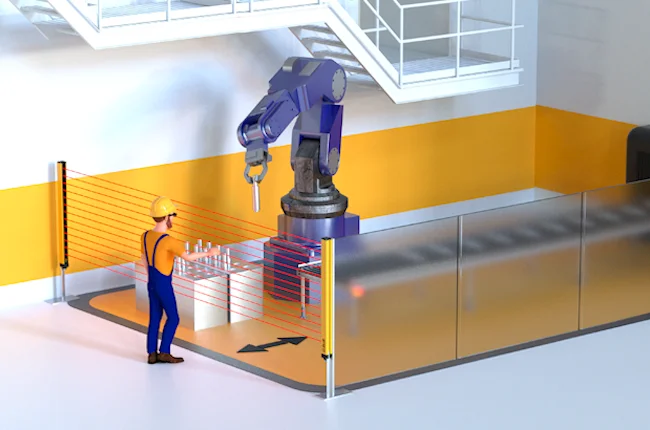
Scenario 1 – Possibilità di raggiungere il punto pericoloso solo attraverso l’area sensibile
Barriere con risoluzione per rilevamento mani o dita. Risoluzione barriera (d): 14 – 20 – 30 – 40 mm
S = K x T + C
dove: K = 2000 o 1600 T = t1 + t2 C = 8x(d-14)
S = 2000xT + 8x(d-14)
La distanza S non deve essere inferiore a 100 mm
Se la distanza S risultante è superiore a 500 mm è possibile ricalcolare la distanza utilizzando K=1600 ma in questo caso la distanza non deve comunque essere inferiore a 500 mm
S = 1600xT + 8x(d-14)
Risoluzione barriera: 14 – 20 – 30 – 40 mm
Barriere con risoluzione per rilevamento braccia o gambe. Risoluzione barriera (d): 50 – 90 mm
S = K x T + C
dove: K = 1600 T = t1 + t2 C = 850
S = 1600xT + 850
Risoluzione Barriera: 50 – 90 mm
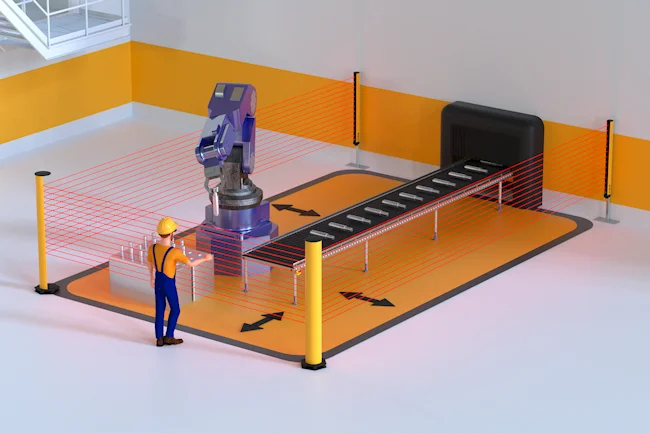
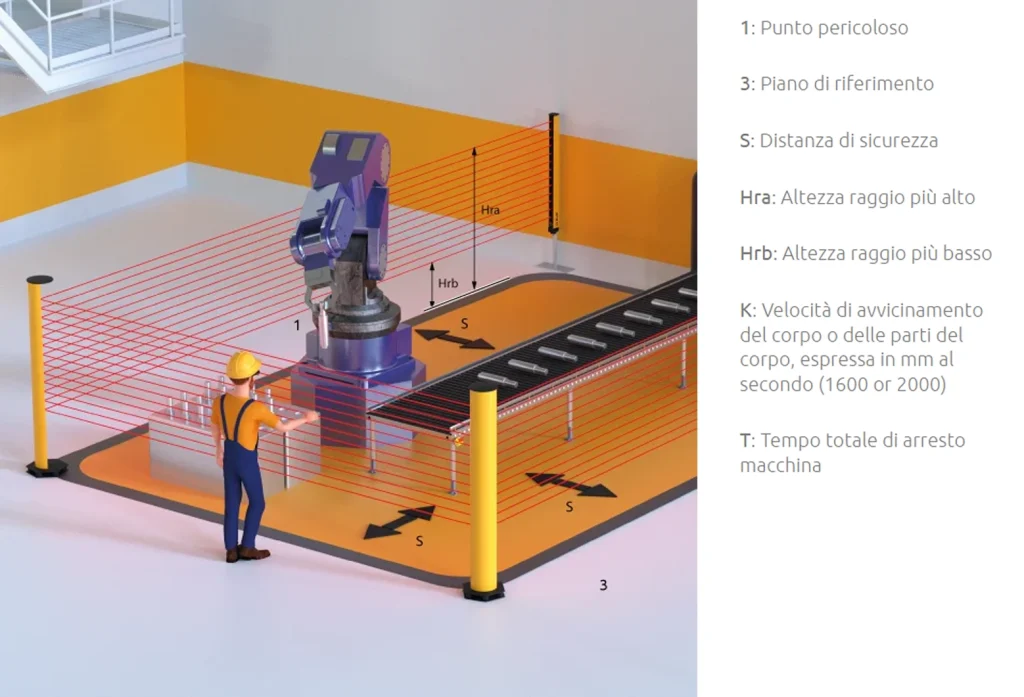
Barriere per controllo presenza in area pericolosa. Barriera con 2 – 3- 4 raggi
S = K x T + C
dove: K = 1600 T = t1 + t2 C = 850
S = 1600xT + 850
Note per barriere a 2 raggi
H raggio più alto = 900 mm
H raggio più basso = 400 mm può essere usato solo se permesso dall’analisi del rischio.
Note per barriere a 3 raggi
H raggio più basso = 300 mm
H raggio inter medio = 700 mm
H raggio più alto = 1100 mm
Note per barriere a 4 raggi
H raggio più basso = 300 mm
H raggio intermedio 1 = 600 mm
H raggio intermedio 2 = 900 mm
H raggio più alto = 1200 mm
Altezza del raggio dal piano do riferimento (Es. pavimento)
Barriera per controllo accesso: 2, 3 o 4 raggi
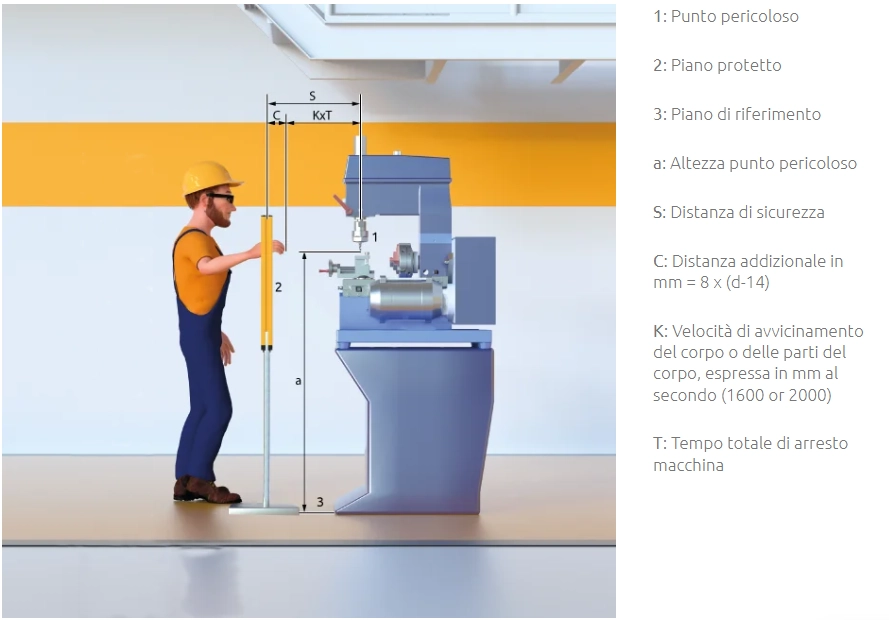
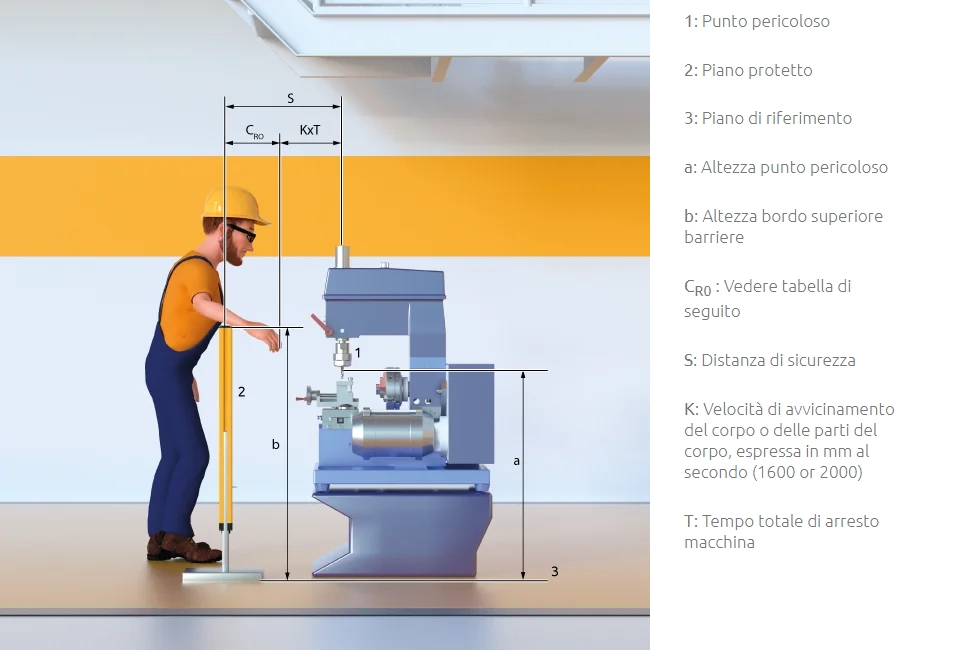
Scenario 2 – Possibilità di raggiungere il punto pericoloso sporgendosi oltre il bordo dell’area sensibile
Barriere con risoluzione per rilevamento mani, dita, braccia e gambe.
S = K x T + C
dove: K = 2000 o 1600 (Vedere i calcoli seguenti) T = t1 + t2 CRO = Vedere la seguente tabella 1
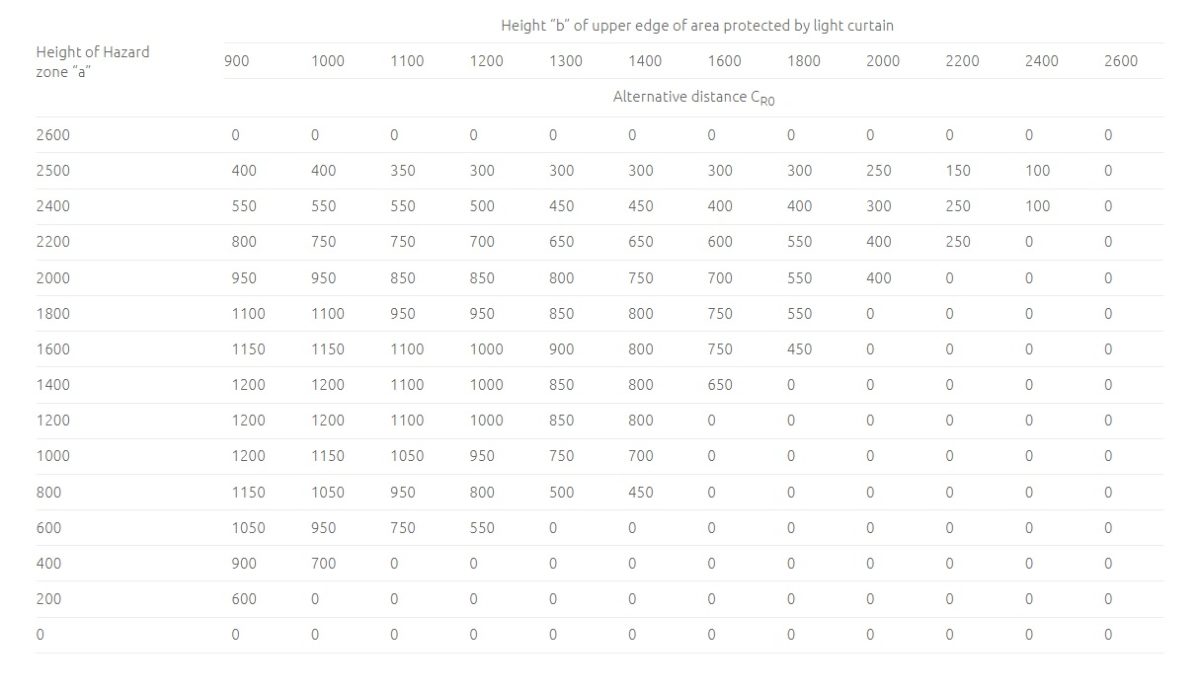
In questo caso Il valore di C, denominato “CRO”, si ricava dalla Tabella 1 della ISO 13855:2010.
Non è ammessa l’interpolazione
Se le distanze a, b o CRO ricadono fra due valori della tabella occorre usare il maggiore dei due
Il valore di CRO calcolato usando la Tabella 1 della ISO 13855:2010 va sempre paragonato al valore di C calcolato nel modo “tradizionale” C = 8x(d-14). Il valore da adottare sarà il maggiore dei due
Scenario 3 – Possibilità di raggiungere il punto pericoloso appoggiandosi alla protezione meccanica e baypassare la barriera
Nel caso di protezioni combinate meccaniche ed elettro-sensibili (come in figura), dove sarebbe possibile appoggiarsi alla protezione meccanica e baypassare la barriera
S = K x T + C
Dove: K = 2000 o 1600 (Vedere il calcolo seguente) T = t1 + t2 C = Vedere tabelle 1 oo 2 della ISO 13857:2007
Per il calcolo del parametro C si devono utilizzare le tabelle della norma ISO 13857:2007 (ex EN 294):
Tabella 1 (per applicazioni a basso rischio) oppure
Tabella 2 (per applicazioni ad alto rischio)
In questo catalogo le due tabelle della norma ISO 13857:2007 (ex EN 294) – Distanze di sicurezza per impedire il raggiungimento di zone pericolose con arti superiori e inferiori – non sono riportate.
Risoluzione barriera: 20 – 30 – 40 – 50 – 90 mm
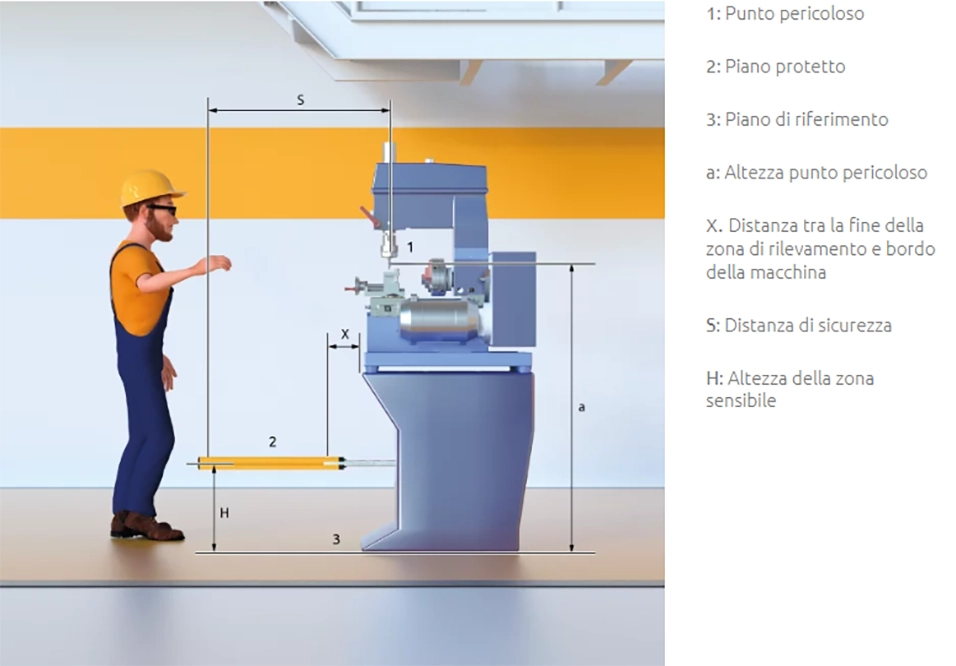
Direzione di avvicinamento parallelo al piano protetto α=0° (± 5°)
Barriere orizzontali per controllo presenza in area pericolosa.
S = K x T + C
dove: K = 1600 T = t1 + t2 C = 1200 – (0,4 x H)
S = 1600xT + (1200 – 0,4xH)
Note:
C = 1200 – (0,4 x H) deve essere sempre uguale o maggiore di 850 mm
L’altezza massima permessa è: Hmax = 1000 mm
L’altezza H è in rapporto alla risoluzione d della barriera e si calcola con la seguente formula: H = 15 x (d – 50)
Si può utilizzare questa formula in modo inverso anche per calcolare la risoluzione massima utilizzabile alle varie altezze: d = H / 15 + 50.
La risoluzione massima da utilizzare è per esempio: con Hmax = 1000 mm d = 116 mm con Hmin = 0 mm d = 50 mm
Qualora l’altezza H sia superiore a 300 mm la possibilità di accesso al di sotto dei raggi deve essere presa in considerazione durante l’analisi dei rischi
Quando si usa la barriera come sensore combinato di presenza e attraversamento, la distanza x deve essere minore o uguale alla capacità di rilevamento.
Risoluzione barriera: 50 – 90 mm
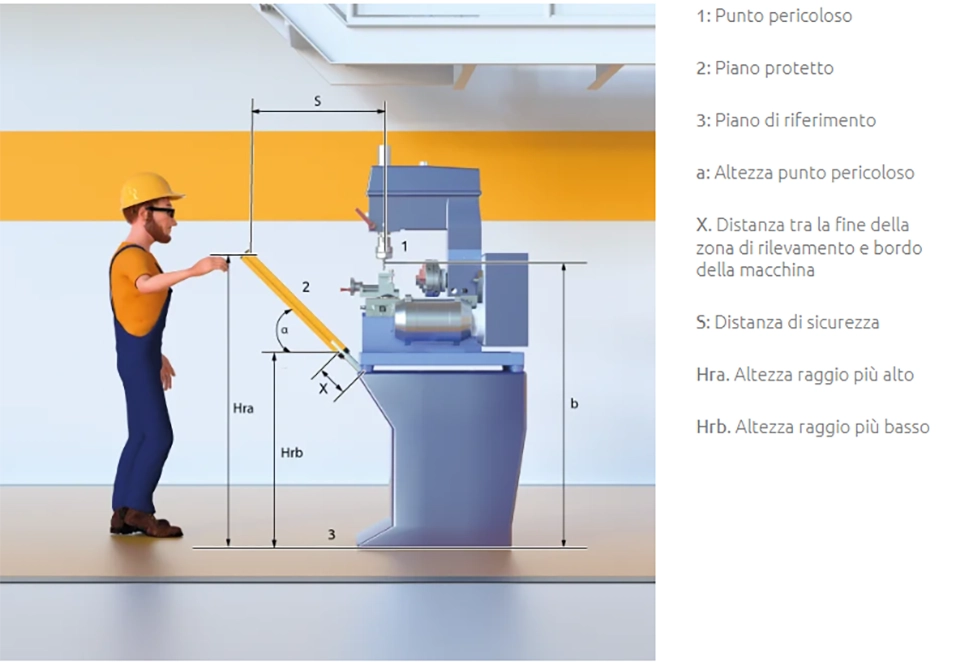
Direzione di avvicinamento angolare rispetto al piano protetto 5°< α <85°
Barriere inclinate per rilevamento delle mani o braccia e controllo presenza in area pericolosa
Con angolo α > ±30° fare riferimento ai casi “direzione di avvicinamento perpendicolare al piano protetto α=90° (± 5°)”
Con angolo α < ±30° fare riferimento al caso “DIrezione di avvicinamento parallelo al piano protetto α =0° (± 5°)”
Note:
La distanza S è riferita al raggio più lontano dal punto pericoloso
L’altezza del raggio più lontano dal punto pericoloso non deve essere superiore a 1000 mm
Per il calcolo dell’altezza H o della risoluzione d applicare al raggio più basso le seguenti formule: H = 15 x (d – 50) d = H / 15 + 50
Quando si usa la barriera come sensore combinato di presenza e attraversamento, la distanza x deve essere minore o uguale alla capacità di rilevamento
Risoluzione barriera: 20 – 30 – 40 mm o 50 – 90 mm per presenza in area pericolosa
Registrandoti sul sito Reer, è possibile utilizzare il tool gratuito per calcolare la distanza di sicurezza.